EMF posterior del motor síncron d'imant permanent
1. Com es genera la força electromagnètica inversa?
La generació de la força electromotriu inversa és fàcil d'entendre. El principi és que el conductor talla les línies de força magnètiques. Sempre que hi hagi moviment relatiu entre les dues, el camp magnètic pot ser estacionari i el conductor el talla, o el conductor pot ser estacionari i el camp magnètic es mou.
Per als motors síncrons d'imants permanents, les seves bobines estan fixes a l'estator (conductor) i els imants permanents estan fixos al rotor (camp magnètic). Quan el rotor gira, el camp magnètic generat pels imants permanents del rotor girarà i serà tallat per les bobines de l'estator, generant força electromotriu inversa a les bobines. Per què s'anomena força electromotriu inversa? Com el seu nom indica, la direcció de la força electromotriu inversa E és oposada a la direcció de la tensió terminal U (com es mostra a la Figura 1).
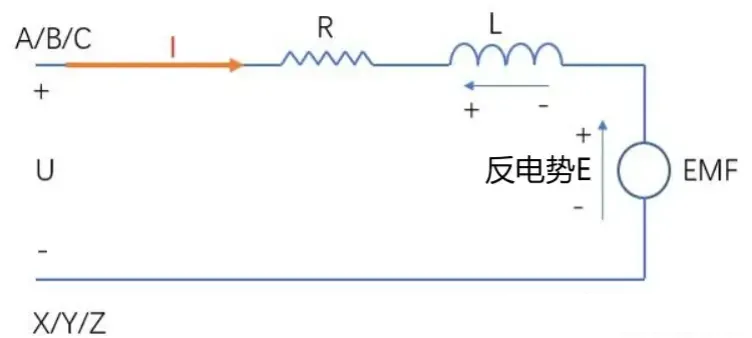
Figura 1
2. Quina és la relació entre la força electromotriu inversa i la tensió terminal?
Es pot veure a la Figura 1 que la relació entre la força electromotriu inversa i la tensió terminal sota càrrega és:
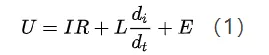
La prova de força electromotriu inversa es realitza generalment sense càrrega, sense corrent i a una velocitat de 1000 rpm. Generalment, el valor de 1000 rpm es defineix com a coeficient de força electromotriu inversa = valor/velocitat mitjana de la força electromotriu inversa. El coeficient de força electromotriu inversa és un paràmetre important del motor. Cal destacar que la força electromotriu inversa sota càrrega canvia constantment abans que la velocitat sigui estable. A partir de la fórmula (1), podem saber que la força electromotriu inversa sota càrrega és menor que la tensió del terminal. Si la força electromotriu inversa és més gran que la tensió del terminal, es converteix en un generador i emet tensió a l'exterior. Com que la resistència i el corrent en el treball real són petits, el valor de la força electromotriu inversa és aproximadament igual a la tensió del terminal i està limitat pel valor nominal de la tensió del terminal.
3. El significat físic de la força electromotriu inversa
Imagineu-vos què passaria si la força electromotriu posterior no existís? A partir de l'equació (1), podem veure que sense la força electromotriu posterior, tot el motor és equivalent a una resistència pura, convertint-se en un dispositiu que genera molta calor, cosa que és contrària a la conversió d'energia elèctrica en energia mecànica del motor. A l'equació de conversió d'energia elèctrica UIt és l'energia elèctrica d'entrada, com ara l'energia elèctrica d'entrada a una bateria, motor o transformador; I2Rt és l'energia de pèrdua de calor a cada circuit, que és un tipus d'energia de pèrdua de calor, com més petita millor; la diferència entre l'energia elèctrica d'entrada i l'energia elèctrica de pèrdua de calor, és l'energia útil corresponent a la força electromotriu posterior.
UIt és l'energia elèctrica d'entrada, com ara l'energia elèctrica d'entrada a una bateria, motor o transformador; I2Rt és l'energia de pèrdua de calor a cada circuit, que és un tipus d'energia de pèrdua de calor, com més petita millor; la diferència entre l'energia elèctrica d'entrada i l'energia elèctrica de pèrdua de calor, és l'energia útil corresponent a la força electromotriu posterior. En altres paraules, la força electromotriu inversa s'utilitza per generar energia útil i està inversament relacionada amb la pèrdua de calor. Com més gran sigui l'energia de pèrdua de calor, més petita serà l'energia útil assolible. Objectivament parlant, la força electromotriu inversa consumeix energia elèctrica al circuit, però no és una "pèrdua". La part de l'energia elèctrica corresponent a la força electromotriu inversa es convertirà en energia útil per a equips elèctrics, com ara l'energia mecànica dels motors, l'energia química de les bateries, etc.
En altres paraules, la força electromotriu inversa s'utilitza per generar energia útil i està inversament relacionada amb la pèrdua de calor. Com més gran sigui l'energia de pèrdua de calor, més petita serà l'energia útil assolible. Objectivament parlant, la força electromotriu inversa consumeix energia elèctrica al circuit, però no és una "pèrdua". La part de l'energia elèctrica corresponent a la força electromotriu inversa es convertirà en energia útil per a equips elèctrics, com ara l'energia mecànica dels motors, l'energia química de les bateries, etc.
Es pot veure a partir d'això que la magnitud de la força electromotriu posterior significa la capacitat de l'equip elèctric per convertir l'energia d'entrada total en energia útil, cosa que reflecteix el nivell de capacitat de conversió de l'equip elèctric.
4. De què depèn la magnitud de la força electromotriu inversa?
La fórmula de càlcul de la força electromotriu inversa és: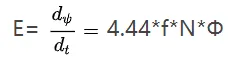
E és la força electromotriu de la bobina, ψ és el flux magnètic, f és la freqüència, N és el nombre d'espires i Φ és el flux magnètic.
Basant-me en la fórmula anterior, crec que tothom pot dir alguns factors que afecten la magnitud de la força electromotriu inversa. Aquí teniu un article per resumir-ho:
(1) La força electromotriu inversa és igual a la taxa de canvi del flux magnètic. Com més alta sigui la velocitat, més gran serà la taxa de canvi i més gran serà la força electromotriu inversa.
(2) El flux magnètic en si mateix és igual al nombre d'espires multiplicat pel flux magnètic d'una sola espira. Per tant, com més alt sigui el nombre d'espires, més gran serà el flux magnètic i més gran serà la força electromotriu inversa.
(3) El nombre d'espires està relacionat amb l'esquema de bobinatge, com ara la connexió estrella-triangle, el nombre d'espires per ranura, el nombre de fases, el nombre de dents, el nombre de branques paral·leles i l'esquema de pas complet o pas curt.
(4) El flux magnètic d'una sola espira és igual a la força magnetomotriu dividida per la resistència magnètica. Per tant, com més gran sigui la força magnetomotriu, més petita serà la resistència magnètica en la direcció del flux magnètic i més gran serà la força electromotriu inversa.
(5) La resistència magnètica està relacionada amb l'entreferro i la coordinació pol-ranura. Com més gran sigui l'entreferro, més gran serà la resistència magnètica i més petita serà la força electromotriu inversa. La coordinació pol-ranura és més complicada i requereix una anàlisi específica.
(6) La força magnetomotriu està relacionada amb el magnetisme residual de l'imant i l'àrea efectiva de l'imant. Com més gran sigui el magnetisme residual, més alta serà la força electromotriu inversa. L'àrea efectiva està relacionada amb la direcció de magnetització, la mida i la col·locació de l'imant i requereix una anàlisi específica.
(7) El magnetisme residual està relacionat amb la temperatura. Com més alta sigui la temperatura, més petita serà la força electromotriu inversa.
En resum, els factors que afecten la força electromotriu inversa inclouen la velocitat de rotació, el nombre de voltes per ranura, el nombre de fases, el nombre de branques paral·leles, el pas complet i el pas curt, el circuit magnètic del motor, la longitud de l'entreferro, la coincidència pol-ranura, el magnetisme residual de l'acer magnètic, la col·locació i la mida de l'acer magnètic, la direcció de magnetització de l'acer magnètic i la temperatura.
5. Com seleccionar la magnitud de la força electromotriu inversa en el disseny d'un motor?
En el disseny de motors, la força electromotriu inversa E és molt important. Si la força electromotriu inversa està ben dissenyada (mida adequada, baixa distorsió de la forma d'ona), el motor és bo. La força electromotriu inversa té diversos efectes importants sobre el motor:
1. La magnitud de la força electromotriu posterior determina el punt magnètic feble del motor, i el punt magnètic feble determina la distribució del mapa d'eficiència del motor.
2. La taxa de distorsió de la forma d'ona de la contraelectromoció afecta el parell d'ondulació del motor i la suavitat de la sortida de parell quan el motor està en funcionament.
3. La magnitud de la força electromotriu posterior determina directament el coeficient de parell del motor, i el coeficient de força electromotriu posterior és proporcional al coeficient de parell.
A partir d'això, es poden obtenir les següents contradiccions en el disseny del motor:
a. Quan la força electromotriu posterior és gran, el motor pot mantenir un parell elevat al corrent límit del controlador a la zona de funcionament a baixa velocitat, però no pot generar parell a alta velocitat i ni tan sols pot assolir la velocitat esperada;
b. Quan la força electromotriu posterior és petita, el motor encara té capacitat de sortida a la zona d'alta velocitat, però el parell no es pot aconseguir amb el mateix corrent de controlador a baixa velocitat.
6. L'impacte positiu de la contraelectromoció en els motors d'imants permanents.
L'existència de la força electromotriu inversa és molt important per al funcionament dels motors d'imants permanents. Pot aportar alguns avantatges i funcions especials als motors:
a. Estalvi d'energia
La força electromotriu posterior generada pels motors d'imants permanents pot reduir el corrent del motor, reduint així la pèrdua de potència, la pèrdua d'energia i aconseguint l'objectiu d'estalviar energia.
b. Augmentar el parell de torsió
La força electromotriu inversa és oposada a la tensió d'alimentació. Quan la velocitat del motor augmenta, la força electromotriu inversa també augmenta. La tensió inversa reduirà la inductància del debanat del motor, cosa que provocarà un augment del corrent. Això permet que el motor generi un parell addicional i millori el rendiment de potència del motor.
c. Desacceleració inversa
Després que el motor d'imant permanent perdi potència, a causa de l'existència de la contraelectromoció (EMF), pot continuar generant flux magnètic i fer que el rotor continuï girant, cosa que forma l'efecte de la contraelectromoció a velocitat inversa, que és molt útil en algunes aplicacions, com ara màquines-eina i altres equips.
En resum, la contraelectromoció és un element indispensable dels motors d'imants permanents. Aporta molts avantatges als motors d'imants permanents i juga un paper molt important en el disseny i la fabricació de motors. La mida i la forma d'ona de la contraelectromoció depenen de factors com el disseny, el procés de fabricació i les condicions d'ús del motor d'imants permanents. La mida i la forma d'ona de la contraelectromoció tenen una influència important en el rendiment i l'estabilitat del motor.
Anhui Mingteng Permanent Magnet Electromechanical Equipment Co., Ltd. (https://www.mingtengmotor.com/)és un fabricant professional de motors síncrons d'imants permanents. El nostre centre tècnic compta amb més de 40 persones d'R+D, dividides en tres departaments: disseny, procés i proves, especialitzades en la investigació i el desenvolupament, el disseny i la innovació de processos de motors síncrons d'imants permanents. Mitjançant programari de disseny professional i programes especials de disseny de motors d'imants permanents de desenvolupament propi, durant el procés de disseny i fabricació del motor, la mida i la forma d'ona de la força electromotriu posterior es consideraran acuradament segons les necessitats reals i les condicions de treball específiques de l'usuari per garantir el rendiment i l'estabilitat del motor i millorar l'eficiència energètica del motor.
Copyright: aquest article és una reimpressió del número públic de WeChat "电机技术及应用", l'enllaç original https://mp.weixin.qq.com/s/e-NaJAcS1rZGhSGNPv2ifw
Aquest article no representa els punts de vista de la nostra empresa. Si teniu opinions o punts de vista diferents, corregiu-nos!
Data de publicació: 20 d'agost de 2024